手機訪問更快捷
更多流量 更易傳播
隨時掌握行業(yè)動態(tài)
產(chǎn)品推薦:原料藥機械|制劑機械|藥品包裝機械|制冷機械|飲片機械|儀器儀表|制藥用水/氣設備|通用機械
技術
制藥網(wǎng)>技術中心>技術文章列表>正文
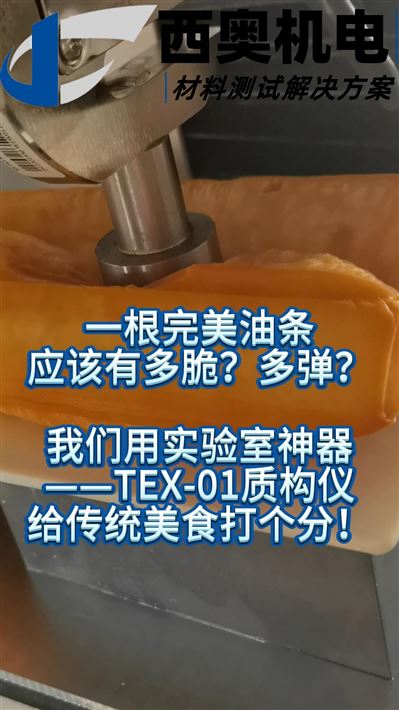
從實驗室到餐桌:質構分析在食品感官評價中的角色
血液透析袋測漏機
多工位測漏機
歡迎聯(lián)系我
免責聲明
廣播電視節(jié)目經(jīng)營許可證
互聯(lián)網(wǎng)藥品信息服務資格證書
醫(yī)療器械網(wǎng)絡交易服務第三方平臺備案憑證
ICP備案號:浙B2-20100369
浙公網(wǎng)安備 33010602000006號
服務咨詢:0571-87759679 QQ:652787579
采購服務:15857110060(微信同號) QQ:2861342245
展會合作:0571-89719776 QQ:357275273
投訴熱線:0571-87759679 QQ:652787579
客服熱線:0571-87209770 QQ:652790304
手機/微信:13675870512
安卓版制藥通APP
(不支持蘋果手機)
制藥網(wǎng)手機版
產(chǎn)品






 手機版
手機版 制藥網(wǎng)手機版
制藥網(wǎng)手機版
 制藥網(wǎng)小程序
制藥網(wǎng)小程序
 官方微信
官方微信 公眾號:zyzhan
公眾號:zyzhan
 直播中
直播中  預告
預告  預告
預告